Software integration and development:
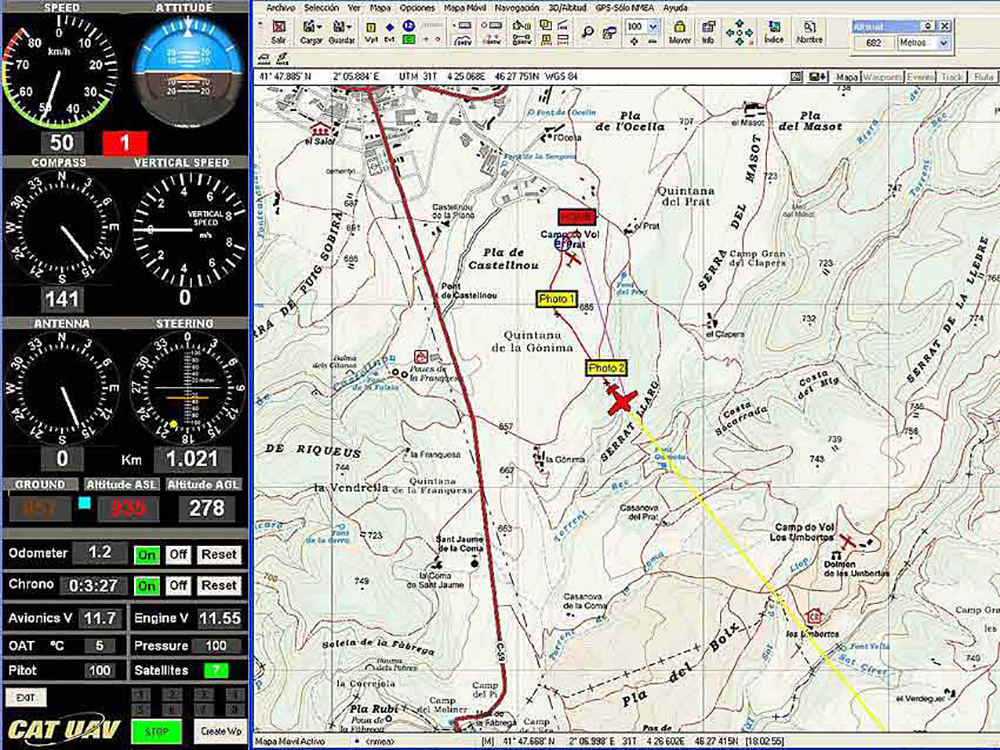
On its beginnings, CATUAV had to develop a full software package for UAS operation and control because of the lack of available solutions in the market. Furthermore, our vocation is to be always working in cutting edge UAS technology and applications, which usually forces us to develop custom software packets for both UAS control and data processing.
Having the most suitable suite of software is key in order to properly deploy any UAS application. Our background has given us a deep knowledge of the most relevant software solutions available in the market, so we can analyze the needs of your project and select the best software tools to apply. And if there is no available solution, we can always design and develop custom new software for it.
If you want to know more about how our capabilities can benefit your project check our know-how list or read about some of our most relevant projects below:

RAWFIE – 2016 to 2018
RAWFIE (Road-, Air-, and Water- based Future Internet Experimentation) is a project funded by the European Commission (Horizon H2020 programme) under the Future Internet Research Experimentation (FIRE+) initiative that aims at providing research facilities for Internet of Things (IoT) devices. The project introduces a unique platform across the space and technology by integrating numerous test beds of unmanned vehicles for research experimentation in vehicular, aerial and maritime environments. The platform will support experimenters with smart ...
Read More
Read More

MAPKITE – 2015 to 2017
MapKITE project has materialized a new mobile, terrestrial and aerial, geodata collection and mapping paradigm. Geodata acquisition in mapKITE is accomplished by a tandem terrestrial-aerial mapping system based on a terrestrial vehicle and on an unmanned aircraft, both equipped with remote sensing payloads. In the mapKITE paradigm, the UA (Unmanned Aircraft) follows the TV (Terrestrial Vehicle) at an approximate constant flying height above ground while geodata are acquired simultaneously from air and ground. The final ...
Read More
Read More

ALDRONE – 2015
Today there are 110M landmines deployed in 78 countries, including in Europe, killing up to 20,000 a year. The removal of landmines is slow and manual, dangerous (for every 5000 mines cleared 1 worker is killed and 2 injured), and costly ($300–1000 to remove 1 mine). In the past 5 years less than 1000 km2 worldwide were cleared of mine. At this pace it will take 1100yrs to remove all the landmines. To meet these ...
Read More
Read More

PHYTOSCOPE – 2012 to 2014
Phytoscope (stands for PHYToplankton biOdiversity multiScale Characterization using advanced Optical technologies) was carried out in the Alfacs bay as a scientific campaign to collect data for the Phytoscope project. This campaign was organized by the ICM (CSIC) and directed by Dr. Jaume Piera. CATUAV participated capturing thermal images with the NEC F30 camera and hyperspectral images with the new RIKOLA. In total, CATUAV made 14 UAV flights that will show the variability of the control ...
Read More
Read More

MESTRAL – 2012 to 2015
The main goal of the project MESTRAL (stands for Modelling and advanced observational tEchnologies to link tranSport processes, opTically-active constituents, and wateR light-field vAriability in a coastaL ecosystem) was to investigate the presence of small-scale transport processes in the Alfacs Bay, and how they affect the spatial patterns of optically active constituents (sediments, phytoplankton and dissolved organic matter) and the underwater light-field variability. Over three years the Marine Technology Unit (CMIMA / CSIC), directed by Jaume Piera, ...
Read More
Read More